doi: 10.62486/latia2024103
ORIGINAL
Color in images: a machine vision
approach to the measurement of CIEL*a*b* coordinates in bovine loins
El color en imágenes: un enfoque de
visión artificial para la medición de coordenadas CIEL*a*b* en lomos de bovino
Olga Lucía Torres Vargas1 *, Mateo Valencia Buitrago1 *
1Universidad del
Quindío. Colombia.
Citar como:
Torres Vargas OL, Valencia Buitrago M. Color in images: a machine vision
approach to the measurement of CIEL*a*b* coordinates in bovine loins. LatIA.
2024; 2:103. https://doi.org/10.62486/latia2024103
Recibido:
03-02-2024 Revisado:
09-05-2024 Aceptado: 15-08-2024 Publicado:
16-08-2024
Editor: Prof.
Dr. Javier González Argote 
ABSTRACT
Electronic machine vision systems bring together a
set of technologies and techniques used to capture, process and analyze images
to perform a specific task, such as object or measurement pattern recognition.
These systems rely on image processing and machine learning algorithms to
interpret visual information. Therefore, the objective of this research was the
construction of an electronic machine vision system (SVA) for color analysis in
bovine (longisimus dorsi) loins based on the CIEL*a*b* color space. The VAS
implementation was carried out using the programming language Python 3.9
programming language and the color parameters obtained were compared with those
obtained on a Minolta CR-400 colorimeter (CM). Both systems were synchronized
to provide the user with information about the color coordinates in the samples
of loins stored for 6 days at 4°C. The results obtained showed no significant
differences. The results obtained showed no significant differences in the
values of the L* parameter, while b* and a* showed significant differences
during the storage time of the loins. These results are attributed to the
oxidation process of the myoglobin and to factors such as breed, feeding and
slaughtering process of the cattle, which affect the color of the samples. The
results obtained indicate that VAS could be used for the determination of color
during the storage of beef loins in real time, offering a non-invasive and
low-cost solution to the actors in the meat chain.
Keywords:
Image Analysis; Beef; Colorimeter; Artificial Vision System.
RESUMEN
Los
sistemas electrónicos de visión artificial reúnen un conjunto de tecnologías y técnicas
utilizadas para capturar, procesar y analizar imágenes que realizaran una tarea
específica, como el reconocimiento de objetos o patrones de medida. Estos
sistemas se basan en algoritmos de procesamiento de imágenes y aprendizaje
automático para interpretar la información visual. Por lo tanto, el objetivo de
esta investigación fue la construcción de un sistema electrónico de visión
artificial (SVA) para el análisis de color, en lomos de bovino (longisimus
dorsi) fundamentado en el espacio de color CIEL*a*b*. La implementación del
SVA se llevó a cabo utilizando el lenguaje de programación Python 3.9 y los
parámetros de color obtenidos fueron comparados con los obtenidos en un
colorímetro Minolta CR-400 (CM). Ambos sistemas fueron sincronizados para proporcionar
al usuario información acerca de las coordenadas de color en las muestras de
los lomos almacenados durante 6 días a 4°C. Los resultados obtenidos, no
presentaron diferencias significativas en los valores del parámetro L*,
mientras que b* y a* presentaron diferencias significativas durante el tiempo
de almacenamiento de los lomos, estos resultados son atribuidos al proceso de
oxidación de la mioglobina y a factores como la raza, la alimentación y el
proceso de sacrificio de los bovinos, que afectan, el color de las muestras.
Los resultados obtenidos indican que el SVA podría ser utilizado para la
determinación del color durante el almacenamiento de lomos de bovino en tiempo
real, ofreciendo una solución no invasiva y de bajo costo a los actores de la
cadena cárnica.
Palabras
clave: Análisis de Imagen; Carne de Bovino;
Colorímetro; Sistema de Visión Artificial.
INTRODUCCIÓN
El color es una de las
características organolépticas que más
influye en la aceptabilidad de la carne y juega un papel importante en la
decisión de compra por parte del consumidor (Parra et al., 2021). Uno de los
problemas que presenta la evaluación del color es la metodología empleada para
la obtención de información significativa, que permita comparar y mejorar
los productos cárnicos
de una forma versátil, rápida
y en situ. Las medidas de color
en los alimentos suelen realizarse con colorímetros
digitales, que, aunque son fáciles
de usar y calibrar, tienen
limitaciones como el costo, el mantenimiento
especializado, el tamaño del área de medición y la necesidad de contacto con la
superficie a medir (Sanmartín et al., 2021). Por lo tanto; es importante que la evaluación
del color se realice de manera coherente y objetiva, para obtener resultados
fiables y reproducibles que reflejen la percepción humana
y puedan realizarse de una manera
no invasiva (Wu & Sun, 2013).
El espacio
de color CIEL*a*b*
ha demostrado ser uno de los más adecuados para evaluar
el color en el área de alimentos, correlaciona los valores numéricos de color
consistentemente con la percepción visual
humana (Anilkumar et al., 2021).
Este sistema cartesiano consta
de tres ejes: L* vertical, nos informa del grado de luminosidad o brillo de un
color (Wyszecki & Stiles, 2000) y puede tomar valores entre 0 (negro) a 100
(blanco); a* horizontal, indica el contenido de rojo (+a*) o verde (-a*); y b*
horizontal y perpendicular a a*, que representa el contenido de amarillo (+b*)
o azul (-b*).
Estudios
realizados utilizando SVA para la evaluación del color, se han centrado en la
conversión de las imágenes obtenidas mediante el sistema de medida de color RGB
al sistema CIEL*a*b* (Larraín
et al., 2008).
Análisis de la calidad del lomo de cerdo mediante un SVA en línea y un modelo de
inteligencia artificia, indicaron que el SVA puede proporcionar una herramienta
eficaz para predecir el color y el veteado en la carne porcina en las líneas de
proceso en tiempo real (Sun et al.,2018). SVA y sistemas embebidos fueron
utilizados como alternativas para evaluar la frescura de la carne de bovino,
mediante el análisis de componentes principales (PCA) y máquinas de soporte
vectorial (SVM), los resultados muestran que el sistema propuesto puede
predecir con
éxito
la frescura, sugiriendo su viabilidad para su uso en el lugar y en tiempo real
(Arsalane et al., 2020). Los SVA pueden
determinar con precisión el color de productos cárnicos en el espacio
CIEL*a*b*, garantizando la calidad de sus productos, mediante una evaluación
rápida y precisa; características que a su vez puede influir en la percepción
de los consumidores y en la rentabilidad del negocio (Nasiri & Mohi, 2021).
Altmann et al. (2022) analizaron la metodología de percepción de los
seres humanos de las diferencias de color en la carne de cerdo cruda,
utilizando un sistema de visión por computadora. Modzelewska-Kapituła & Jun
(2022) realizaron aplicaciones de SVA en
la medición de volumen y superficie, evaluación de la calidad, determinación de
la composición química de la carne y predicción de la calidad
sensorial. El desarrollo de un
SVA
que pueda determinar con precisión el color en el espacio CIEL*a*b* de las imágenes
en lomos de bovino, se presenta como una herramienta invaluable para la industria
cárnica (Nasiri & Mohi, 2021). Por lo tanto, el desarrollo de SVA para el análisis de color en productos
cárnicos se ha convertido en un campo de gran relevancia debido a su
importancia como indicador de calidad de la carne.
MÉTODO
El
proyecto que se presenta a continuación fue realizado en dos etapas, en la
primera etapa se realizó la construcción del sistema electrónico de visión
artificial (SVA) para el análisis de color en de lomos de bovino Longissimus
dorsi y sus componentes físicos. Los lomos fueron
adquiridos en un supermercado de la ciudad
de Armenia, Quindío,
con certificación Invima para su comercialización. En la segunda etapa
fue realizada la programación del sistema
de medida hardware
en el sistema Python 3.9. Ambos sistemas debidamente sincronizados se
encargan de presentar al usuario las coordenadas CIEL*a*b* en muestras de carne de bovino fresca
(sacrificada el día cero) y almacenadas
durante 6 días a 4°C, como se explica a continuación.
Configuración de la Raspberry
Pi 4 para la captura y procesamiento de imágenes en el espacio de color
CIEL*a*b*
Para
asegurar la captura y procesamiento eficientes de imágenes de alta calidad, así
como la velocidad necesaria para la aplicación, la selección del hardware del SVA
es
crucial
y depende del nivel de precisión y del entorno de uso. Los componentes
esenciales incluyen cámaras de alta resolución, procesadores de imagen,
unidades de procesamiento gráfico (GPU) y dispositivos de almacenamiento de
datos, que deben elegirse cuidadosamente para garantizar que el sistema cumpla
con las funciones requeridas. Los componentes que se presentan en la tabla 1
fueron utilizados en la construcción del SVA obtenido.
|
Tabla 1. Componentes del Hardware utilizados en la construcción del
sistema de visión artificial (SVA)
|
|
|
Descripción
|
Características
|
|
Raspberry pi 4
|
La Raspberry Pi 4 es
una computadora de placa única (SBC, por sus siglas en inglés) desarrollada por la Fundación Raspberry Pi. Es una
versión más reciente y potente de la serie de computadoras Raspberry Pi,
conocida por su tamaño compacto, bajo
costo y versatilidad.
|
·
Procesador: Broadcom BCM2711 de cuatro
núcleos
·
Memoria RAM:
4 GB
·
GPIO: Conserva la interfaz
GPIO (General Purpose Input/Output) que permite la conexión de componentes
electrónicos y periféricos externos
·
Conectividad: Ofrece
diversas opciones de conectividad, incluyendo puertos USB 3.0 y 2.0, conexión
Gigabit Ethernet, Wi-Fi 802.11ac de doble
banda y Bluetooth 5.0
|
|
Cámara
|
La Logitech PRO C920
es una cámara web de alta calidad
que ofrece una excelente combinación de resolución de video, calidad
de imagen, audio
claro y facilidad de uso,
|
·
Resolución de video: La
C920 captura video en Full HD 1080p a 30
fotogramas por segundo
·
Corrección automática de
iluminación: Incorpora tecnología de corrección automática de
iluminación que ajusta automáticamente la exposición y el balance de
blancos
|
|
Iluminación
|
Regleta LED blanca,
dispositivo de iluminación que consta de una serie de LEDs blancos dispuestos en una estructura alargada y delgada.
|
·
La potencia consumida por
toda la regleta es 14,9W,
la cual genera
una eficacia de luminosidad de 148l m/W
|
Para garantizar un buen funcionamiento del SVA, fue colocada una lámina de color negro en la superficie exterior del
equipo, que evita el paso de la luz al interior del compartimiento de medida de
la imagen de la muestra (figura 1), el cual se encuentra recubierto por una
lámina blanca en su interior. Ambas
laminas se encargan de eliminar la interferencia de luz exterior
y estabilizar la reflexión de la luz interior del compartimiento
de medida.
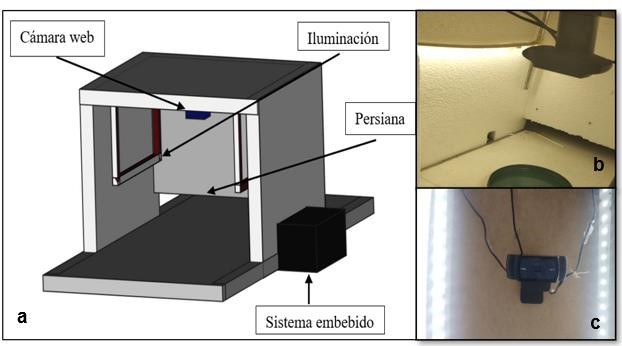
Figura 1. a)
Sistema de Visión Artificial (SVA) para la medición y análisis de color en
muestras de lomos de bovino,
b) Compartimiento interno
del SVA, c) Posicionamiento de la cámara y el sistema de iluminación.
Proceso de adquisición de la imagen
en el Sistema de Visión
Artificial (SVA)
Para
la implementación de un SVA acorde a los requisitos planteados y teniendo en
cuenta las características del hardware adquirido, se planteó el diseño de un
software que permita la calibración de la cámara y la detección del color de
los lomos de bovino, siguiendo las etapas propuestas en el diagrama de
bloques que se presenta en la figura
2. El eje central de esta etapa está conformado
por un sistema embebido, dicho sistema
fue implementado en una Raspberry Pi 4, ejecutando el sistema operativo Raspberry
Pi OS, que se encargan de capturar la imagen, segmentarla, redimensionarla, almacenarla y entregar una respuesta en
términos del sistema CIEL*a*b* al usuario.

Figura 2. Etapas
establecidas en el diseño y construcción del software para el Sistema de Visión
Artificial (SVA)
Finalizada la sincronización del equipo fue realizada la etapa de calibración. La distancia
focal y centro óptico obtenidos en la matriz de calibración de la cámara se
presentan en la tabla 2. Estos valores
fueron utilizados en la función
de calibración, con el propósito
de obtener una mejor resolución de imagen en el momento
de la captura de la longitud focal (fx, fy), centros
ópticos (cx, cy) y la comparación de la imagen obtenida en la cámara
sin calibrar, como se puede observar en la figura 3.
|
Tabla 2. Valores de los parámetros intrínsecos de la cámara
Logitech PRO C920
|
|
Parametros
|
Valor
|
|
fx
|
956,602
|
|
fy
|
103,179
|
|
cx
|
291,159
|
|
cy
|
73,680
|
Para
determinar el color se utilizó una cámara Logitech PRO C920, que ofrece
ventajas como la captura de una gran cantidad de información espacial, la
capacidad de medir superficies de diversos tamaños, disponibilidad de una
amplia gama de modelos a precios más accesibles, y no requieren contacto directo
con la superficie a medir. Sin embargo, la información se obtiene en el espacio
de color: Rojo, Verde, Azul (RGB) debe transformarse al espacio de color
CIEL*a*b*, usando modelos teóricos (Castellanos et al., 2022). Los parámetros y las ecuaciones que se utilizaron en esta etapa se presentan en la tabla 3.
|
Tabla
3. Caracterización del color
en lomos de bovino: ecuaciones y equipo especializado
|
|
Parametros
|
Ecuaciones
|
Equipo de medida de color
|
|
Luminosidad: L*
|
L* = 116 (𝑌1/3/𝑌𝑛)− 16 Ec. (1)
|

|
|
Coordenada
|
a* = 500
[(𝑋1/3/ 𝑋𝑛) − (𝑌1/3/𝑌𝑛)] 𝐸𝑐. (2)
|
|
cromáticas: a*
|
|
|
b* = 200
[(𝑌1/3/Yn)− (𝑍 1/3Zn] 𝐸𝑐. (3)
|
Colorímetro CR-400
|
|
Coordenada
|
(Konica Minolta Sensing Americas. ,2023)
|
|
cromáticas: b*
|
|
Con
el propósito de establecer un parámetro de comparación, fueron realizada
medidas de color en el SVA y el colorímetro CR-400 Konica Minolta (tabla 3),
tomando las coordenadas de color L*, a* y b* en cinco puntos de cada muestra de
lomos de bovino fresco y almacenados durante 6 días, los valores reportados
fueron calculados como el promedio de estas medidas. La determinación y
expresión del color fue realizada con base a las coordenadas CIEL*a*b* (tabla
3) y los valores de reflectancia (CIE, 1976), obteniendo las coordenadas:
Luminosidad (L*), rojo-verde (a*), amarillo-azul (b*), directamente del equipo.
RESULTADOS Y DISCUSIÓN
A continuación, se presentan los resultados obtenidos
durante la realización del proyecto, una vez finalizadas la construcción del sistema electrónico y la programación del sistema de medida
hardware del SVA en su forma estructural, se construyó un compartimiento para la adquisición de las imágenes,
que funciona como la estructura principal del equipo, que soporta la muestra de lomos
de bovino que se va a analizar y los demás componentes, como se puede observar
en la figura 1.
Captura de la Imagen y
extracción de las coordenadas CIEL*a*b* en el SVA
El proceso
de captura de imágenes que realiza el SVA es fundamental para la adquisición de datos visuales que serán
utilizados en el análisis del color de los lomos y análisis posteriores. La
figura 3 muestra las diferentes etapas que fueron realizadas en SVA durante la
captura, calibración y segmentación de la imagen. Inicialmente, fue realizada
la preparación del entorno y de la muestra de lomos de bovino, para ello fueron
garantizadas las condiciones óptimas de iluminación y alineación que
permitieran una captura precisa de la imagen (figura 3a). La distancia focal y
centro óptico obtenidos en la matriz de calibración de la cámara se presentan
en la tabla 2. Estos valores son utilizados en la función de calibración, con
el propósito de obtener una mejor resolución de la imagen al momento de la
captura y la comparación con la imagen obtenida en la cámara sin calibrar.
La
imagen fue capturada mediante la cámara Logitech PRO C920 y sometida a un
proceso de análisis para reducir
el ruido y mejorar su calidad,
también fueron realizados ajustes de contraste y
corrección de color, para optimizar su utilidad en análisis posteriores (figura
3b). Terminado el proceso anterior,
fue realizada la segmentación de la imagen con el propósito de identificar la
región de interés (ROI) dentro de la imagen completa del lomo de bovino
obtenida (figura 3c). Esta segmentación implicó la utilización de técnicas avanzadas
de procesamiento de imágenes, como umbralización y detección de características que permitieran distinguir la ROI del fondo y otros elementos irrelevantes. La región de interés identificada se convierte en el foco principal de análisis
y aplicaciones posteriores, permitiendo la detección de características,
reconocimiento de patrones y toma de decisiones basadas
en una información visual precisa
y relevante.
|

|

|

|
|
a) Imagen
sin calibrar
|
b) Imagen
calibrada
|
c) Imagen
segmentada
|
Figura 3. Imagen de lomo de bovino a) antes y b) después
del proceso de calibración y c) imagen
segmentada
Una vez concluidas las etapas anteriores se realizó la medida y se extrajeron los valores de los parámetros L*, a* y b* de la imagen obtenida del
lomo de bovino. La imagen adquirida por el software Python 3.9 fue convertida
del espacio RGB al espacio CIEL*a* b*, utilizando las ecuaciones (1), (2) y (3)
que se presentan en la tabla 3. El sistema calcula la media de las coordenadas Luminosidad (L*), rojo-verde (a*), amarillo-azul (b*). Finalmente, el usuario podrá
visualiza en la interfaz ambas componentes enfrentadas a la imagen original de
lomos de bovino durante los días (0-6) de almacenamiento a 4°C, como se
presenta en la tabla 4. Esta información es almacenada en el computador.
Comparación entre
las medidas de color obtenidas en el Sistema
de Visión Artificial (SVA) y el Colorímetro Minolta
CR-400 (CM)
Las
coordenadas de color L*, a* y b*, obtenidas en el SVA fueron comparados con las
coordenadas obtenidas en el CM y se presentan en la tabla 4. Para poder obtener
los valores de color en el CM fue necesario tomar medidas en varias secciones
de la muestra y obtener valores promedio, debido a que el área de
análisis del colorímetro es de aproximadamente
8 mm de diámetro y no alcanzaba
a cubrir el área total de las muestras
de carne, tejido conectivo y grasa intramuscular que podrían influir
en las características colorimétricas de la parte magra de estas
(Girolami et al., 2013).
|
Tabla 4. Coordenadas CIEL* a* b* en muestras de lomos de bovino durante
el tiempo de almacenamiento a 4°C, adquiridas en el Sistema de Visión Artificial (SVA) y el Colorímetro
Minolta CR-400 (CM)
|
|
Muestra
|
Tiempo de
almacenamiento
|
Valores coordenadas CIEL*a* b*
|
|
SVA
|
CM
|
|

|
|
L*: 59,61186178
|
L*: 60,48523865
|
|
Día 0
|
a*: 5,3776992
|
a*: 5,96368978
|
|
|
b*: -8,3727804
|
b*: -9,44569322
|
|

|
|
L*: 58,27551214
|
L*: 58,26325783
|
|
Día 1
|
a*: 5,64158818
|
a*: 5,89857451
|
|
|
b*: -9,77889147
|
b*: -10,80364578
|
|

|
|
L*: 50,12012421
|
L*: 49,85823695
|
|
Día 2
|
a*: 2,64234985
|
a*: 2,59834857
|
|
|
b*: -4,39190818
|
b*: -5,52364735
|
|

|
|
L*: 51,35447075
|
L*: 50,56891525
|
|
Día 3
|
a*: 2,35686958
|
a*: 2,56457985
|
|
|
b*: -4,21038999
|
b*: -4,32659524
|
|
|
|
L*: 61,63334934
|
L*: 50,85621394
|
|
Día 4
|
a*: 3,06043796
|
a*: 3,84785622
|
|
|
b*: -4,96354232
|
b*: -5,29425367
|
|

|
|
L*: 48,91479247
|
L*: 49,09458236
|
|
Día 5
|
a*: 2,94847217
|
a*: 3,52584793
|
|
|
b*: -4,34895065
|
b*: -3,95864127
|
|

|
|
L*: 48,23733609
|
L*: 48,18945633
|
|
Día 6
|
a*: 1,46530337
|
a*: 1,98647817
|
|
|
b*: -2,86972267
|
b*: -3,99857426
|
Muestras: lomos de bovino, Equipo:
SVA: sistema de visión artificial, CM Colorímetro Minolta, tiempo de almacenamiento
(Dia 0-6), L*, a* y b* coordenadas de color.
Los valores
obtenidos en el SVA de muestras
de lomo de bovino representan la muestra en su
totalidad y pueden ser observadas desde el monitor del equipo, permitiendo
garantizar medidas homogéneas de las partes magras o de interés para el
investigador. Los valores obtenidos
para la coordenada L* presentaron tendencias similares en los dos
equipos de medida para las muestras de lomos de bovino. Esta coordenada está
relacionada con el pigmento total contenido en la carne, haciendo que el
producto sea más oscuro o más opaco como se puede observar en la tabla 4. Los
valores de L* disminuyen con el tiempo de almacenamiento, indicando
que L* es útil para diferenciar el color
entre muestras de carnes durante
el tiempo de almacenamiento (Xing et al., 2007).
La
coordenada a* está relacionada con el contenido de mioglobina y la coordenada
b* está relacionada con los estados de la mioglobina (Pérez et al., 1998). Los
valores obtenidos para las coordenadas a* y b* presentaron diferencias
significativas entre los dos equipos de medida. Disminuyeron durante las
primeras horas de almacenamiento, tiempo que corresponde a la etapa de
oxidación de la carne haciendo que se presenten cambios más pronunciados en b*, este comportamiento también
puede atribuirse a la luz reflejada y refractada de las capas de metaglobina y glucoglobina. (Girolami et al., 2013). Otro factor que pudo influir en los
valores obtenidos para a y b* es atribuido a la metodología empleada
para la captura de la imagen en el Colorímetro Minolta y a factores
como la raza, alimentación de los bovinos
y el proceso de sacrificio que afectan el proceso
de oxidación de la mioglobina y por lo tanto el color de las muestras de carne
durante el tiempo de almacenamiento.
Los
procesos descritos anteriormente, desde la construcción del sistema electrónico
de visión artificial hasta el diseño
del software para análisis de color en lomos de bovino, han culminado en resultados
significativos y prometedores. Estos resultados ofrecen una visión clara sobre
la viabilidad y eficacia del sistema desarrollado para la evaluación del color
en muestras de carne bovina fresca y almacenada.
CONCLUSIONES
Los valores
de color obtenidos mediante la aplicación de las coordenadas CIEL*a*b* y su comparación con el Colorímetro Minolta
CR-400 en las muestras de lomos de bovino fresco y durante el tiempo de
almacenamiento, no presentaron diferencias estadísticas significativas con
relación a los valores de L*, los valores obtenidos para a* y b* presentaron
diferencias estadísticas atribuidas a la metodología empleada para la captura de la imagen en el Colorímetro Minolta
y a factores propios de la carne de bovino.
Los
resultados obtenidos permitieron establecer que el sistema de visión artificial
construido puede ser utilizado en la realización de medidas de color en
lomos de bovino fresco y durante el tiempo de almacenamiento de una forma sencilla, rápida,
no invasiva, en tiempo real y
bajo costo.
Esta
herramienta tecnológica permitirá a los productores, comercializadores y
procesadores de carne,
tomar medidas de gestión adecuadas para obtener productos de calidad y alta aceptación por parte de los consumidores.
También constituye en la actualidad un importante campo abierto de
investigación y una excelente oportunidad para la electrónica y la
agroindustria, apuntando a la generación de ciencia y tecnología propia.
REFERENCIAS BIBLIOGRÁFICAS
1. Altmann, B. A.,
Gertheiss, J., Tomasevic, I., Engelkes, C., Glaesener, T., Meyer, J., Schäfer,
A., Wiesen, R., & Mörlein, D. (2022). Human perception of color differences
using computer vision system measurements of raw pork loin. Meat science, 188,
108766. https://doi.org/10.1016/j.meatsci.2022.108766
2. Anilkumar, K. K.,
Manoj, V. J., & Sagi, T. M. (2021). Efficacy of CIEL*a*b* and cmyk color
spaces in leukemia image analysis: a comparison by statistical techniques.
Biomedical Engineering: Applications, Basis and Communications, 33(06),
2150042. http://dx.doi.org/10.4015/S1016237221500423.
3. Arsalane, Assia
& Klilou, Abdessamad & Noureddine, El Barbri & Abdelmoumen,
Tabyaoui. (2020). Artificial vision and embedded systems as alternative tools
for evaluating beef meat freshness. 1-6. 10.1109/ICOA49421.2020.9094503.
4. Castellanos
Tolosa, N y Sánchez Jiménez, M. (2022). Desarrollo de carne de hamburguesa a
base de harina de grillo. Universidad de los Andes. Disponible en: http://hdl.handle.net/1992/55654.
5. Girolami, A.,
Napolitano, F., Faraone, D., & Braghieri, A. (2013). Measurement of meat color using a computer vision system.
Meat science, 93(1), 111–118. https://doi.org/10.1016/j.meatsci.2012.08.010.
6. Larraín, R.,
Schaefer, D., Reed, J. (2008). Use of digital images to estimate CIE color
coordinates of beef. Food Research International, 41(4), 380-385. DOI:
10.1016/j.foodres.2008.01.002.
7.
Modzelewska-Kapituła, M., & Jun, S. (2022). The application of computer
vision systems in meat science and industry–A review. Meat Science, 192,
108904. DOI: 10.1016/j.meatsci.2022.108904.
8. Nasiri, A., &
Mohi, K. (2021). A machine vision-based system for measuring the chromatic
parameters of bell pepper using artificial neural networks.
9. Parra-Bracamonte,
G. M., López-Villalobos, N., Vázquez-Armijo, J. F., Magaña-Monforte,
10. J. G.,
Martínez-González, J. C., & Moreno-Medina, V. R. (2021). Perspectivas Del
Consumidor Mexicano Sobre La Calidad De La Carne De Bovino. Perspectives Of Mexican Consumer on Beef Quality. Tropical
and Subtropical Agroecosystems, 24,85. DOI: http://dx.doi.org/10.56369/tsaes.3702.
11. Pérez-Álvarez, J.
A.; Fernández-López, J.; Sayas-Barberá, M. E.; Cartagena-García, R. (1998). Caracterización de los parámetros de color de diferentes
materias primas usadas en la industria cárnica. Eurocarne 63, 115-122
12. Salueña, B. H.,
Gamasa, C. S., Rubial, J. M. D., & Odriozola, C. A. (2019). CIELAB color
paths during meat shelf life. Meat science, 157, 107889. DOI:
10.1016/j.meatsci.2019.107889.
13. Santos, M. D.,
Castro, R., Delgadillo, I., & Saraiva, J. A. (220). Improvement of the
refrigerated preservation technology by hyperbaric storage for raw fresh meat.
Journal of the Science of Food and Agriculture, 100(3), 969-977. DOI:
10.1002/jsfa.10083.
14. Sanmartín, P.,
Fuentes, E., Serrano, M., & Prieto, B. (2021). Methodological aspects for
the determination of color in soil-plant relationship studies.
15. Sun, X., Young,
J., Liu, J. H., & Newman, D. (2018). Prediction of pork loin quality using
online computer vision system and artificial intelligence model. Meat science,
140, 72–77. https://doi.org/10.1016/j.meatsci.2018.03.005.
16. Wu, D., Sun, D.
(2013). Colour measurements by computer vision for food quality control A
review. Trends in Food Science and Technology, 29(1), 5-20. https://doi.org/10.1016/j.tifs.2012.08.004.
17. Wyszecki, G.,
& Stiles, W. S. (2000). Color science. Concepts and methods, quantitative
data and formulae Jonh Wiley and Sons, Inc Second.
18. Zaukuu, J. L. Z.,
& Tsyawo, E. C. (2024). Rapid and non-destructive detection of ponceau 4R
red colored pork. Meat Science,
209, 109400. 10.1016/j.meatsci.2023.109400.
FINANCIACIÓN
No existe financiación para el
presente trabajo.
CONFLICTO DE INTERES
Los
autores declaran que no existe conflicto de interés.
CONTRIBUCIÓN DE AUTORÍA
Conceptualización:
Olga Lucía Torres Vargas, Mateo Valencia Buitrago.
Investigación:
Olga Lucía Torres Vargas, Mateo Valencia Buitrago.
Metodología:
Olga Lucía Torres Vargas, Mateo Valencia Buitrago.
Administración del
proyecto: Olga Lucía Torres Vargas, Mateo
Valencia Buitrago.
Redacción-borrador
original: Olga Lucía Torres Vargas, Mateo
Valencia Buitrago.
Redacción-revisión y
edición: Olga Lucía Torres Vargas, Mateo
Valencia Buitrago.