doi: 10.62486/latia2024105
ORIGINAL
Classification
of tomato ripeness in the agricultural industry using a computer vision system
Clasificación de la
madurez de tomates en la industria agrícola mediante un sistema de visión
artificial
Mateo Valencia Buitrago1 *, Olga Lucía Torres Vargas2 *
1Universidad
del Quindío, Ingeniería Electrónica, Facultad de Ingeniería. Colombia.
2Universidad
del Quindío, Ingeniería de Alimentos, Instituto Interdisciplinario de las
Ciencias. Colombia.
Citar como:
Valencia Buitrago M, Torres Vargas OL. Classification of tomato ripeness in the
agricultural industry using a computer vision system. LatIA.
2024; 2:105. https://doi.org/10.62486/latia2024105
Recibido: 05-02-2024 Revisado:
11-05-2024 Aceptado: 15-08-2024 Publicado:
16-08-2024
Editor: Prof.
Dr. Javier González Argote 
ABSTRACT
Machine vision
systems (SVA) occupy an important place in the field of food and agriculture,
these techniques are performed in situ, are efficient, non-invasive,
time-saving and more economical than traditional techniques. Tomatoes (Solanum
lycopersicum) are extensively cultivated throughout the world, are essential in
the agricultural and culinary fields and are recognized for their beneficial
contributions to health. Lack of knowledge about fruit maturity, proper
harvesting and postharvest handling are factors responsible for large
postharvest losses. Therefore, the objective of this research was the
construction of a VAS that allows establishing relationships between color and
maturity stage of the Chonto Roble F1 tomato. The VAS built is composed of
hardware and software duly synchronized through the application of computer
vision algorithms in Python 3.9 software that allow it to perform the
acquisition and segmentation of the image and present the user with the color
coordinates in the CIEL*a*b* system. Finally, color measurements were performed
on tomato samples at different stages of ripening in the VAS and a HunterLab
ColorQuest XE (EHL) spectrophotometer. The results obtained indicated that
there are no significant differences in both measurement systems for L* values,
the changes produced in b* and a* were statistically significant for tomato
samples. The results obtained indicated the potential use of the constructed
VAS for the determination of the degree of maturity of tomatoes in real time,
in a non-invasive and low-cost way.
Keywords: Image Analysis; CIEL*a*b*; Spectrophotometer; Machine Vision
System; Tomato.
RESUMEN
Los sistemas de visión artificial (SVA) ocupan un lugar
importante en el campo de la alimentación y la agricultura, estas técnicas se
realizan en sitú, son eficientes, no invasivas, ahorran tiempo y son más
económicas que las técnicas tradicionales. Los tomates (Solanum
lycopersicum), son cultivados extensivamente en
todo el mundo, son esenciales en el ámbito agrícola y culinario y son reconocidos por sus aportes
benéficos a la salud. La falta de conocimiento sobre la madurez del fruto, una
cosecha adecuada y el manejo postcosecha son factores responsables de grandes
pérdidas postcosecha. Por lo tanto, el objetivo de esta
investigación fue la construcción de un SVA que permite establecer relaciones
entre el color y el estado de madurez del tomate Chonto Roble F1. El SVA
construido está compuesto por un hardware y un software debidamente
sincronizados mediante la aplicación de algoritmos de visión computacional en
el software Python 3.9 que le permiten realizar la adquisición y segmentación
de la imagen y presentar al usuario las coordenadas de color en el sistema
CIEL*a*b*. Finalmente fueron realizadas medidas de color en muestras de tomate
con diferentes estados de maduración en el SVA y un espectrofotómetro HunterLab
ColorQuest XE (EHL). Los resultados obtenidos indicaron que no hay diferencias
significativas en ambos sistemas de medida para los valores de L*, los cambios
producidos en b* y a* fueron estadísticamente significativos para las muestras
de tomate.
Los resultados obtenidos indicaron el potencial uso del SVA construido, para la
determinación el grado de madurez de tomates en tiempo real, de una forma no
invasiva y a bajo costo.
Palabras
clave: Análisis de Imagen; CIEL*a*b*; Espectrofotómetro;
Sistema de Visión Artificial; Tomate.
INTRODUCCIÓN
Los tomates, son cultivados
extensivamente en todo el mundo, son valiosos no solo por el sustento
que brindan a los agricultores y consumidores sino también por sus beneficios para la salud, contienen
vitamina C y licopeno (Ciptaningtyas et al., 2022), este último puede reducir
el riesgo de cáncer de mama y próstata, osteoporosis, enfermedades
cardiovasculares y reducir la presión arterial alta (Przybylska &Tokarczyk,
2022). Sin embargo, la falta de conocimiento sobre la madurez y el manejo de
postcosecha, son factores responsables de las enormes pérdidas que sufren los
agricultores en la actualidad. La evaluación de la madurez
y la calidad del tomate
depende en gran medida
de las características externas del fruto, su evaluación puede hacerse
empleando métodos no invasivos (Ninja & Manuj-Kumar, 2022). Evaluar la
madurez y cosechar un producto en la etapa correcta es un arte y difiere de un
cultivo a otro, la madurez es un proceso irreversible que afecta directamente a
la calidad interna y externa del fruto (Prasad et al., 2018). Durante el
cultivo de tomate es común considere seis etapas para la maduración del color
del tomate (Etapas de madurez y maduración): verde, quebradizo, torneado, rosado, rojo claro
y rojo, además del desarrollo del sabor, la textura
y el aroma, estas etapas de maduración en los tomates ocurren desde el
invernadero o parcela de cultivo,
el transporte, la compra, el estante, la refrigeración hasta
el consumo. (Hongli et al.,
2023).
Los sistemas electrónicos de visión
artificial (SVA) representan una técnica emergente en la alimentación y la
agricultura, desempeñan un papel importante en la solución de problemas
prácticos de clasificación y reconocimiento automáticos. Estas técnicas han
superado el trabajo manual, no son invasivas, ahorran tiempo, son económicas, rigurosas y precisas. Investigaciones
utilizando SVA para la evaluación del color en alimentos, se han centrado
en la conversión de las imágenes obtenidas mediante el sistema
de medida de color RGB al sistema CIEL*a*b* (Larraín et al., 2008), en este campo se han explorado
varios enfoques, incluido el examen de los índices de color en relación con la
madurez del tomate y el empleo de procesamiento de imágenes. Khan et al. 2011
realizaron estudios para el reconocimiento de madurez de tomate con
transformadores convolucionales, Konagaya et al. 2020 monitorearon la calidad del tomate maduro
(etapa roja) durante el almacenamiento mediante
imágenes de fluorescencia visible inducida por luz ultravioleta, Changxia et al.
(2021) formularon un algoritmo de reconocimiento de madurez de tomate basado en
una red residual profunda de múltiples niveles, Nassiri et al. (2022) utilizaron la clasificación de lógica
difusa en tomates maduros basada en la fusión de propiedades físicas. Sharma et
al. (2020) implementaron un índice de maduración para la evaluación basada en el color del comportamiento de maduración de los frutos de tomate. La evaluación
del color debe realizase de manera coherente y objetiva, para obtener
resultados fiables y reproducibles que reflejen la percepción humana y puedan realizarse de una manera
no invasiva (Wu et al. 2013). Por lo tanto,
el objetivo de esta investigación fue la construcción de un SVA que
permite establecer relaciones entre las imágenes de color en coordenadas CIEL*a*b* y el estado
de madurez del tomate Chonto
Roble F1.
MÉTODO
Para el desarrollo de la investigación
que se presenta a continuación, se construyó e implementó un sistema de visión artificial (SVA) para clasificar tomates por su estado
de madurez, fundamentados en los espacios de color CIEL*a*b* (1986).
Materia prima
Como materia prima fueron utilizados
tomate (Solanum lycopersicum) variedad chonto Roble F1, cosechados en
fincas de la región del Quindío, los cuales representan un importante reglón en
la economía del departamento. Los tomates fueron clasificados, visualmente por el color del pericarpio, aplicando los criterios de estados de maduración
establecidos por la Normas Técnicas Colombianas ICONTEC, para tomate (NTC 1103-
1). Una vez seleccionados, éstos fueron analizados en el SVA y en EHL.
Sistema de visión artificial (SVA)
Para
llevar a cabo el proceso
de toma de las imágenes
de color en las muestras
de tomate fue construido un SVA, utilizando una cámara digital de
bajo costo LogiTech PRO C920 Full HD, unidades de procesamiento gráfico (GPU),
dispositivos de almacenamiento de datos y un dispositivo de iluminación (serie de LEDs). La programación del sistema de medida hardware fue realizada en el
sistema Python 3.9. Ambos sistemas debidamente sincronizados se encargan de
presentar al usuario las coordenadas CIEL*a*b* en las muestras de tomate con
diferentes días de maduración.
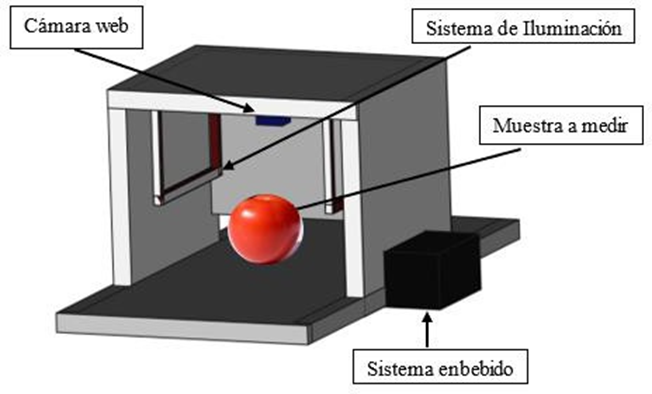
Figura 1. Sistema
de Visión Artificial (SVA) para la medición y análisis de color en muestras de tomate
Para la implementación del SVA, se
planteó el diseño de un software que permita la calibración de la cámara
y la detección del color de los tomates con diferente grado
de maduración, siguiendo las etapas que se presentan en la figura 2.

Figura 2. Etapas establecidas en el diseño
y construcción del software para el Sistema
de Visión Artificial (SVA)
El eje central
del SVA está conformado por un sistema
embebido, implementado en una
Raspberry Pi 4, que ejecuta el sistema operativo Raspberry
Pi OS, que se encargan de capturar la imagen, segmentarla, redimensionarla, almacenarla y entregar una respuesta
en términos de coordenadas CIEL*a*b* al usuario (Valencia, 2023).
Previa a la captura de la imagen, fue
realizada una etapa de calibración. El color fue determinado utilizando una
cámara Logitech PRO C920, que ofrece ventajas como la captura de una gran cantidad de información espacial, la capacidad de medir superficies de diversos tamaños,
disponibilidad de una amplia gama de modelos a precios más accesibles, y no
requieren contacto directo con la superficie a medir. Sin embargo, la
información se obtiene en el espacio de color: Rojo, Verde, Azul (RGB) debe
transformarse al espacio de color CIEL*a*b*, usando modelos teóricos
(Castellanos et al., 2022). Los parámetros y las ecuaciones que se utilizaron en esta etapa
se presentan en la tabla 1.
Tabla 1. Caracterización del color
en tomate: ecuaciones y equipo especializado
|
|
Parametros
|
Ecuaciones
|
Equipo de medida
de color
|
|
Luminosidad: L*
|
L* = 116 (Y1/3/Yn)− 16 Ec.(1)
|

|
|
Coordenadas cromáticas: a*
|
a* = 500 [(X1/3/Xn)− (Y1/3/Ym)] Ec. (2)
|
|
Coordenadas cromáticas: b*
|
b* = 200 [(Y1/3/Yn) − (Z1/3/Zn)] Ec. (3)
|
Espectrofotómetro HunterLab ColorQuest XE (EHL).
|
Con el propósito de establecer un
parámetro de comparación, fueron realizada medidas de color en el SVA y el EHL
a los tomates con diferente grado de
maduración (tabla 3). Las coordenadas L*, a*, b* en el sistema EHL fueron
tomadas empleando una lampara D65, apertura de 1 cm de diámetro y un observador
estándar 2°, en cinco puntos del pericarpio de cada muestra de tomate y los
valores reportados fueron calculados como el promedio de estas medidas. La
determinación y expresión del color fue realizada con base a las coordenadas
CIEL*a*b* (tabla 1), y a los valores de reflectancia (CIE, 1986) obteniendo los
parámetros de Luminosidad (L), rojo-verde (a*), amarillo-azul (b*) directamente
del equipo.
Análisis estadístico
Con el propósito de establecer si
existen diferencias entre las mediciones de color realizadas por el SVA y el
EHL, fue realizado un análisis de varianza (ANOVA- Multifactorial) por
diferencia mínima significativa (LSD) con valor p ≤ 0,05, con tres
factores de interacción, tomando como variables de respuesta las coordenadas L*, a*, b*, y como factor: el grado de
maduración. Este análisis fue realizado utilizando el paquete estadístico
Statgraphic ® Plus, Centurion.15.2.12 XV (Numagistics Ltda).
RESULTADOS Y DISCUSIÓN
Una vez finalizadas la construcción del sistema electrónico y la programación del sistema de medida
hardware del SVA en su forma estructural, se construyó un compartimiento para la adquisición de las imágenes,
que funciona como la estructura principal del equipo, soporta la muestra de tomate que
se va a analizar y los demás componentes, como se puede observar en la figura
1.
La imagen es capturada mediante
la cámara Logitech
PRO C920 y sometida a un proceso de análisis para reducir el ruido
y mejorar su calidad, también fueron realizados ajustes de contraste y
corrección de color, para optimizar su utilidad en análisis posteriores.
Finalizada la etapa anterior, fue realizada la segmentación de la imagen
con el propósito de identificar la región de interés (ROI) dentro de la
imagen de tomate obtenida. Esta segmentación
implicó la utilización de técnicas avanzadas
de procesamiento de imágenes, como umbralización y
detección de características que permitieran distinguir la ROI del fondo y
otros elementos irrelevantes. La región de interés identificada se convierte en
el foco principal de análisis y aplicaciones posteriores, permitiendo la
detección de características, reconocimiento de patrones y toma de decisiones basadas
en una información visual precisa y relevante.
La imagen adquirida es procesada por el
software Python 3.9 y convertida del espacio RGB al espacio CIEL*a*b*, utilizando las ecuaciones (1), (2) y (3) que se presentan
en la tabla 1. El sistema
computa la media de las coordenadas Luminosidad (L*), rojo-verde (a*), amarillo-azul
(b*). Finalmente, el usuario podrá visualiza en la interfaz ambas componentes
enfrentadas a la imagen original de tomate, esta información es almacenada en
el computador.
En la tabla
2 se presentan las coordenadas L*, a* y b* obtenidas
en los epicarpios de las 6 muestras de tomates analizadas con
diferentes grados de maduración en el SVA y el EHL. El proceso de maduración
del tomate se caracteriza por una alta síntesis de carotenoides que genera
cambios en las coordenadas L*, a* y b* (Artés-Calero & Artés- Hernández, 2004).
La coordenada a* presento cambios
significativos, las muestras
1 y 2 presentaron valores negativos (color verde) que progresivamente fueron positivos
(color rojo). López-Camelo et al., (2003) señalan que durante la maduración del
tomate inicialmente se sintetiza el fitoeno (incoloro), para posteriormente dar lugar al ζ-caroteno
(amarillo pálido), licopeno (rojo), β-caroteno
(anaranjado) y xantofilas y carotenoides hidroxilados (amarillos); como podemos
observar en las muestras 3 y 4.
La síntesis de pigmentos amarillentos
precede a la de los rojizos, pero la masiva acumulación de éstos últimos
enmascara a los primeros. Cuando los pigmentos rojos comenzaron a ser
sintetizados ocurrió una disminución de los valores de la coordenada L* que indicó un oscurecimiento o disminución de la luminosidad como se puede observar
en las muestras 5 y 6 (tabla
3). Los cambios
en la coordenada b* no fueron significativos.
En la tabla 3 se presentan los valores para las coordenadas L*, a* y b* obtenidas
en los SVA y el EHL para tomates
con diferentes niveles
de maduración. Los valores obtenidos no presentan diferencias significativas, indicando el uso potencial del SVA en la selección de los tomates por el grado de
madurez.
Tabla 3. Resultados para las coordenadas L*, a* y b* obtenidas en los SVA y el EHL para
tomates con diferentes niveles de maduración
|
|
Sistema de Visión Artificial
|
Espectrofotómetro HunterLab
|
|
Muestras
|
L*
|
a*
|
b*
|
L*
|
a*
|
b*
|
|
1
|
85,42±0,35
|
-10,06±0,16
|
70,73±0,68
|
82,19±0,44
|
-9,06±0,09
|
68,21±0,08
|
|
2
|
81,58±0,19
|
-5,68±0,13
|
71,25±1,05
|
80,71±0,70
|
-6,25±0,72
|
67,17±1,20
|
|
3
|
78,99±0,59
|
12,56±0,98
|
72,25±0,74
|
76,14±0,04
|
8,56±0,95
|
69,54±0,91
|
|
4
|
70,23±0,52
|
21,68±0,53
|
73,80±0,60
|
69,4±0,06
|
20,15±0,90
|
68,70±0,08
|
|
5
|
66,05±0,27
|
31,47±0,31
|
73,28±0,94
|
65,97±0,19
|
33,62±1,06
|
69,12±0,02
|
|
6
|
62,28±0,03
|
43,93±0,07
|
70,41±0,70
|
60,57±1,05
|
44,08±1,53
|
68,32±0,21
|
Los resultados obtenidos permitieron
evaluar el uso del SVA construido, para la determinación del color como un parámetro de clasificación del estado de maduración en tomates de una forma no invasiva,
económica y en tiempo real. Esta herramienta tecnológica podrá ser utilizada
por los agricultores para inspeccionar, clasificar, estimar la madurez
de los productos hortofrutícolas y determinar el tiempo óptimo
de recolección de los frutos,
aumentando su productividad y fortaleciendo la cadena hortofrutícola colombiana.
CONCLUSIONES
La metodología empleada por el SVA desarrollado, permite analizar el
color global de la muestra y su heterogeneidad,
captura, procesa, analiza las imágenes y evalúa el color de forma no invasiva,
utilizando las coordenadas CIEL*a*b*. Este sistema ofrece la posibilidad de
analizar toda la superficie del producto, sus características y defectos,
permitiéndole estimar el estado de madurez de forma rápida, simple y a un bajo
costo, factores que lo diferencian de un espectrofotómetro comercial. Las
imágenes obtenidas le permiten al agricultor clasificar el fruto que este
inmaduro, maduro y demasiado maduro, para su posterior comercialización o
transformación agroindustrial.
REFERENCIAS BIBLIOGRÁFICAS
1. Artés-Calero, F., Artés-Hernández, F. 2004. Tratamientos
postrecolección del tomate fresco. Tendencias e innovaciones, Capítulo 10, pp.
109-120. In: Tomates. Producción y comercio. Ediciones de Horticultura S.L.
Reus, España. ISBN 84- 87729-48-7.
2. Castellanos Tolosa, N y Sánchez Jiménez, M. (2022).
Desarrollo de carne de hamburguesa a base de harina de grillo. Universidad de
los Andes. Disponible en: http://hdl.handle.net/1992/55654.
3. Changxia Li, Xuemei Hou, Nana Qi, Huwei Liu, Yihua Li,
Dengjing Huang, Chunlei Wang, Weibiao Liao. (2021). Insight into ripening-associated transcription
factors in tomato: A review, Scientia Horticulturae,Volume, 288,110363. https://doi.org/10.1016/j.scienta.2021.110363
4. Ciptaningtyas, D., N.
Benyakart, H. Umehara, M. Johkan, N. Nakamura , M. Nagata , T. Orikasa , M.
Thammawong , T. Shiina. (2022) Modelado del
patrón de maduración metacrónica del tomate verde maduro afectado por el
cultivo y la temperatura de almacenamiento Ciencia. Rep., 12, pág. 8241 , https://doi.org/10.1038/s41598-
022-12219-z.CIE (1986) Colorimetry. 2nd Ed. CIE 15.2: Viena
5. Larraín, R., Schaefer, D.,
Reed, J. (2008). Use of digital images to estimate CIE color coordinates of
beef. Food Research International, 41(4), 380-385.
6. Hongli Li, Gangshuai Liu, Daqi
Fu. (2023).Transcriptional regulation of tomato fruit quality, Postharvest
Biology and Technology,Volume 202,112393, https://doi.org/10.1016/j.postharvbio.2023.112393.
7. López-Camelo, A.L., Gómez, P., Artés, F. (2003). Use of a* and b* colour parameters to assess the effect of
some growth regulators on carotenoid biosynthesis during postharvest tomato
ripening. Acta Horticulturae 599:305-308.
8. Nassiri, S. M., Tahavoor, A.,
& Jafari, A. (2022). Fuzzy logic classification of mature tomatoes based on
physical properties fusion. Information Processing in Agriculture, 9(4),
547-555. DOI: 2017.63807ijbse10.22059
9. Ninja Begum, Manuj Kumar
Hazarika. (2022).Maturity detection of tomatoes using transfer learning,
Measurement: Food, Volume 7,100038. https://doi.org/10.1016/j.meafoo.2022.100038.
10. Instituto Colombiano de Norma Tecnica y Certificaión.
Industria Alimentaria: Tomate de Mesa. Bogotá, D.C.: ICONTEC, 1995. Bogotá,
D.C.: ICONTEC, 1976. (Norma Técnica Colombiana; NTC- 1103-1).
11. Khan, A., Hassan, T., Shafay,
M., Fahmy, I., Werghi, N., Mudigansalage, S., & Hussain, I. (2023). Tomato
maturity recognition with convolutional transformers: Scientific Reports. Sci.
Rep., 13(1). https://doi.org/10.1038/s41598-023-50129-w
12. Konagaya, Keiji., Dimas
Firmanda Al Riza, Sen Nie, Minori Yoneda, Takuya Hirata, Noriko Takahashi,
Makoto Kuramoto, Yuichi Ogawa, Tetsuhito Suzuki, Naoshi Kondo. (2020),
Monitoring mature tomato (red stage) quality during storage using
ultraviolet-induced visible fluorescence image, Postharvest Biology and
Technology, Volume 160,111031. https://doi.org/10.1016/j.postharvbio.2019.111031.
13. Prasad, K., Sanu Jacob,
Mohammed Wasim Siddiqui, Chapter 2 - Fruit Maturity, Harvesting, and Quality
Standards, Editor(s): Mohammed Wasim Siddiqui, Preharvest Modulation of
Postharvest Fruit and Vegetable Quality, Academic Press, 2018, Pages 41-69, https://doi.org/10.1016/B978-0-12-809807-3.00002-0.
14. Przybylska, S., &
Tokarczyk, G. (2022). Lycopene in the Prevention of Cardiovascular Diseases.
International journal of molecular sciences, 23(4), 1957. https://doi.org/10.3390/ijms23041957
15. Sharma, L. K. Ramesh , V.
Paul , R. Pandey.( 2020 ). Índice de
maduración: un mejor parámetro para la evaluación basada en el color del
comportamiento de maduración de los frutos de tomate. Fisiol vegetal. Rep. ,
25, págs . 171-177 , https://doi.org/10.1007/s40502-020-00499-4
16. Valencia, M. (2023). Desarrollo de un sistema de visión
artificial para el monitoreo de los cambios de color en lomos de bovino.
[Tesis,Universidad del Quindio]. bdigital.uniquindio.edu.co.
17. Wu, D., Sun, D. (2013). Colour measurements by computer vision for food quality
control A review. Trends in Food Science and Technology, 29(1), 5-20. https://doi.org/10.1016/j.tifs.2012.08.004.
FINANCIACIÓN
No existe financiación
para el presente trabajo.
CONFLICTO DE INTERES
Los autores declaran
que no existe conflicto de interés.
CONTRIBUCIÓN DE AUTORÍA
Conceptualización:
Mateo Valencia Buitrago, Olga Lucía Torres Vargas.
Investigación:
Mateo Valencia Buitrago, Olga Lucía Torres Vargas.
Metodología:
Mateo Valencia Buitrago, Olga Lucía Torres Vargas.
Administración del
proyecto: Mateo Valencia Buitrago, Olga Lucía Torres Vargas.
Redacción-borrador
original: Mateo Valencia Buitrago, Olga Lucía Torres Vargas.
Redacción-revisión y
edición: Mateo Valencia Buitrago, Olga Lucía Torres Vargas.